(Redirected from Nabla in cylindrical and spherical coordinates)
Mathematical gradient operator in certain coordinate systems
This is a list of some vector calculus formulae for working with common curvilinear coordinate systems.
Notes
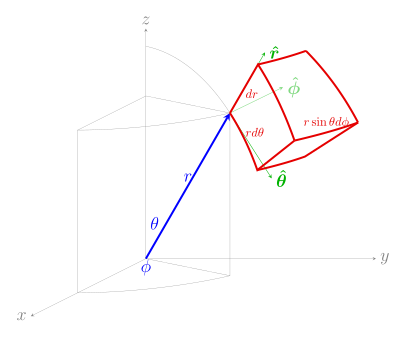
- This article uses the standard notation ISO 80000-2, which supersedes ISO 31-11, for spherical coordinates (other sources may reverse the definitions of θ and φ):
- The polar angle is denoted by
 : it is the angle between the z-axis and the radial vector connecting the origin to the point in question.
: it is the angle between the z-axis and the radial vector connecting the origin to the point in question.
- The azimuthal angle is denoted by
 : it is the angle between the x-axis and the projection of the radial vector onto the xy-plane.
: it is the angle between the x-axis and the projection of the radial vector onto the xy-plane.
- The function atan2(y, x) can be used instead of the mathematical function arctan(y/x) owing to its domain and image. The classical arctan function has an image of (−π/2, +π/2), whereas atan2 is defined to have an image of (−π, π].
Coordinate conversions
Conversion between Cartesian, cylindrical, and spherical coordinates
|
|
From
|
| Cartesian
|
Cylindrical
|
Spherical
|
| To
|
Cartesian
|

|

|

|
| Cylindrical
|

|

|

|
| Spherical
|

|

|

|
Note that the operation  must be interpreted as the two-argument inverse tangent, atan2.
must be interpreted as the two-argument inverse tangent, atan2.
Unit vector conversions
Conversion between unit vectors in Cartesian, cylindrical, and spherical coordinate systems in terms of destination coordinates
|
|
Cartesian
|
Cylindrical
|
Spherical
|
| Cartesian
|

|

|

|
| Cylindrical
|

|

|

|
| Spherical
|

|

|

|
Conversion between unit vectors in Cartesian, cylindrical, and spherical coordinate systems in terms of source coordinates
|
|
Cartesian
|
Cylindrical
|
Spherical
|
| Cartesian
|
|

|

|
| Cylindrical
|

|
|

|
| Spherical
|

|

|
|
Del formula
Table with the del operator in cartesian, cylindrical and spherical coordinates
| Operation
|
Cartesian coordinates (x, y, z)
|
Cylindrical coordinates (ρ, φ, z)
|
Spherical coordinates (r, θ, φ),
where θ is the polar angle and φ is the azimuthal angle
|
| Vector field A
|

|

|

|
| Gradient ∇f
|

|

|

|
| Divergence ∇ ⋅ A
|

|

|

|
| Curl ∇ × A
|

|

|

|
| Laplace operator ∇f ≡ ∆f
|

|

|

|
| Vector gradient ∇A
|

|

|

|
| Vector Laplacian ∇A ≡ ∆A
|

|

|

|
| Directional derivative (A ⋅ ∇)B
|

|

|

|
| Tensor divergence ∇ ⋅ T
|

|

|

|
| Differential displacement dℓ
|

|

|

|
| Differential normal area dS
|

|

|

|
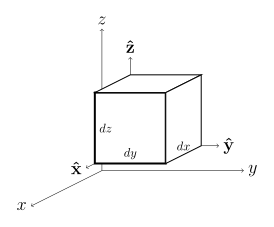
| Differential volume dV
|

|

|

|
- ^α This page uses
 for the polar angle and
for the polar angle and  for the azimuthal angle, which is common notation in physics. The source that is used for these formulae uses for the azimuthal angle and for the polar angle, which is common mathematical notation. In order to get the mathematics formulae, switch and in the formulae shown in the table above.
for the azimuthal angle, which is common notation in physics. The source that is used for these formulae uses for the azimuthal angle and for the polar angle, which is common mathematical notation. In order to get the mathematics formulae, switch and in the formulae shown in the table above.
- ^β Defined in Cartesian coordinates as
 . An alternative definition is
. An alternative definition is  .
.
- ^γ Defined in Cartesian coordinates as
 . An alternative definition is
. An alternative definition is  .
.
Calculation rules



 (Lagrange's formula for del)
(Lagrange's formula for del)
 (From )
(From )
Cartesian derivation


The expressions for  and
and  are found in the same way.
are found in the same way.
Cylindrical derivation






Spherical derivation





Unit vector conversion formula
The unit vector of a coordinate parameter u is defined in such a way that a small positive change in u causes the position vector  to change in
to change in  direction.
direction.
Therefore,
 where s is the arc length parameter.
where s is the arc length parameter.
For two sets of coordinate systems  and
and  , according to chain rule,
, according to chain rule,

Now, we isolate the  component. For
component. For  , let
, let  . Then divide on both sides by
. Then divide on both sides by  to get:
to get:

See also
References
- ^ Griffiths, David J. (2012). Introduction to Electrodynamics. Pearson. ISBN 978-0-321-85656-2.
- Arfken, George; Weber, Hans; Harris, Frank (2012). Mathematical Methods for Physicists (Seventh ed.). Academic Press. p. 192. ISBN 9789381269558.
- Weisstein, Eric W. "Convective Operator". Mathworld. Retrieved 23 March 2011.
- Fernández-Guasti, M. (2012). "Green's Second Identity for Vector Fields". ISRN Mathematical Physics. 2012. Hindawi Limited: 1–7. doi:10.5402/2012/973968. ISSN 2090-4681.
External links
Categories:


