
For small angles, the trigonometric functions sine, cosine, and tangent can be calculated with reasonable accuracy by the following simple approximations:

provided the angle is measured in radians. Angles measured in degrees must first be converted to radians by multiplying them by .
 .
.
These approximations have a wide range of uses in branches of physics and engineering, including mechanics, electromagnetism, optics, cartography, astronomy, and computer science. One reason for this is that they can greatly simplify differential equations that do not need to be answered with absolute precision.
There are a number of ways to demonstrate the validity of the small-angle approximations. The most direct method is to truncate the Maclaurin series for each of the trigonometric functions. Depending on the order of the approximation, is approximated as either or as .
 is approximated as either
is approximated as either  or as
or as  .
.
Justifications
Graphic
The accuracy of the approximations can be seen below in Figure 1 and Figure 2. As the measure of the angle approaches zero, the difference between the approximation and the original function also approaches 0.
-
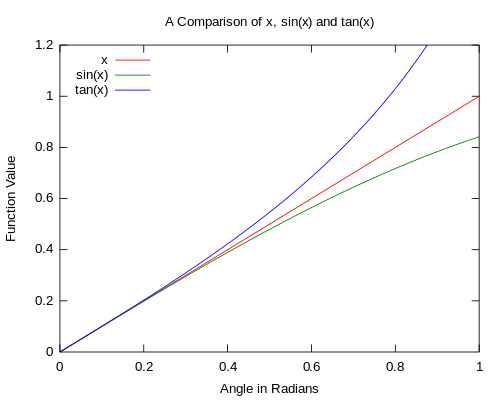 Figure 1. A comparison of the basic odd trigonometric functions to θ. It is seen that as the angle approaches 0 the approximations become better.
Figure 1. A comparison of the basic odd trigonometric functions to θ. It is seen that as the angle approaches 0 the approximations become better.
-
 Figure 2. A comparison of cos θ to 1 − θ/2. It is seen that as the angle approaches 0 the approximation becomes better.
Figure 2. A comparison of cos θ to 1 − θ/2. It is seen that as the angle approaches 0 the approximation becomes better.


Geometric
 The red section on the right, d, is the difference between the lengths of the hypotenuse, H, and the adjacent side, A. As is shown, H and A are almost the same length, meaning cos θ is close to 1 and θ/2 helps trim the red away.
The red section on the right, d, is the difference between the lengths of the hypotenuse, H, and the adjacent side, A. As is shown, H and A are almost the same length, meaning cos θ is close to 1 and θ/2 helps trim the red away.

The opposite leg, O, is approximately equal to the length of the blue arc, s. Gathering facts from geometry, s = Aθ, from trigonometry, sin θ = O/H and tan θ = O/A, and from the picture, O ≈ s and H ≈ A leads to:

Simplifying leaves,

Calculus
Using the squeeze theorem, we can prove that which is a formal restatement of the approximation for small values of θ.
 which is a formal restatement of the approximation
which is a formal restatement of the approximation  for small values of θ.
for small values of θ.
A more careful application of the squeeze theorem proves that from which we conclude that for small values of θ.
 from which we conclude that
from which we conclude that  for small values of θ.
for small values of θ.
Finally, L'Hôpital's rule tells us that which rearranges to for small values of θ. Alternatively, we can use the double angle formula . By letting , we get that .
 which rearranges to
which rearranges to  for small values of θ. Alternatively, we can use the
for small values of θ. Alternatively, we can use the  . By letting
. By letting  , we get that
, we get that  .
.
Algebraic

The Taylor series expansions of trigonometric functions sine, cosine, and tangent near zero are:

where is the angle in radians. For very small angles, higher powers of become extremely small, for instance if , then , just one ten-thousandth of . Thus for many purposes it suffices to drop the cubic and higher terms and approximate the sine and tangent of a small angle using the radian measure of the angle, , and drop the quadratic term and approximate the cosine as .
 is the angle in radians. For very small angles, higher powers of
is the angle in radians. For very small angles, higher powers of  , then
, then  , just one ten-thousandth of
, just one ten-thousandth of  , and drop the quadratic term and approximate the cosine as
, and drop the quadratic term and approximate the cosine as  .
.
If additional precision is needed the quadratic and cubic terms can also be included, , , and .
 ,
,
 , and
, and
 .
.
Dual numbers
One may also use dual numbers, defined as numbers in the form , with and satisfying by definition and . By using the MacLaurin series of cosine and sine, one can show that and . Furthermore, it is not hard to prove that the Pythagorean identity holds:
 , with
, with  and
and  satisfying by definition
satisfying by definition  and
and  . By using the MacLaurin series of cosine and sine, one can show that
. By using the MacLaurin series of cosine and sine, one can show that  and
and  . Furthermore, it is not hard to prove that the
. Furthermore, it is not hard to prove that the 
Error of the approximations

Near zero, the relative error of the approximations , , and is quadratic in : for each order of magnitude smaller the angle is, the relative error of these approximations shrinks by two orders of magnitude. The approximation has relative error which is quartic in : for each order of magnitude smaller the angle is, the relative error shrinks by four orders of magnitude.
 , and
, and  is quadratic in
is quadratic in  has relative error which is quartic in
has relative error which is quartic in Figure 3 shows the relative errors of the small angle approximations. The angles at which the relative error exceeds 1% are as follows:
- at about 0.14 radians (8.1°)
- at about 0.17 radians (9.9°)
- at about 0.24 radians (14.0°)
- at about 0.66 radians (37.9°)
Angle sum and difference
The angle addition and subtraction theorems reduce to the following when one of the angles is small (β ≈ 0):
cos(α + β) ≈ cos(α) − β sin(α), cos(α − β) ≈ cos(α) + β sin(α), sin(α + β) ≈ sin(α) + β cos(α), sin(α − β) ≈ sin(α) − β cos(α).
Specific uses
Astronomy
In astronomy, the angular size or angle subtended by the image of a distant object is often only a few arcseconds (denoted by the symbol ″), so it is well suited to the small angle approximation. The linear size (D) is related to the angular size (X) and the distance from the observer (d) by the simple formula:

where X is measured in arcseconds.
The quantity 206265″ is approximately equal to the number of arcseconds in a circle (1296000″), divided by 2π, or, the number of arcseconds in 1 radian.
The exact formula is

and the above approximation follows when tan X is replaced by X.
Motion of a pendulum
Main article: Pendulum (mechanics) § Small-angle approximationThe second-order cosine approximation is especially useful in calculating the potential energy of a pendulum, which can then be applied with a Lagrangian to find the indirect (energy) equation of motion.
When calculating the period of a simple pendulum, the small-angle approximation for sine is used to allow the resulting differential equation to be solved easily by comparison with the differential equation describing simple harmonic motion.
Optics
In optics, the small-angle approximations form the basis of the paraxial approximation.
Wave Interference
The sine and tangent small-angle approximations are used in relation to the double-slit experiment or a diffraction grating to develop simplified equations like the following, where y is the distance of a fringe from the center of maximum light intensity, m is the order of the fringe, D is the distance between the slits and projection screen, and d is the distance between the slits:

Structural mechanics
The small-angle approximation also appears in structural mechanics, especially in stability and bifurcation analyses (mainly of axially-loaded columns ready to undergo buckling). This leads to significant simplifications, though at a cost in accuracy and insight into the true behavior.
Piloting
The 1 in 60 rule used in air navigation has its basis in the small-angle approximation, plus the fact that one radian is approximately 60 degrees.
Interpolation
The formulas for addition and subtraction involving a small angle may be used for interpolating between trigonometric table values:
Example: sin(0.755) where the values for sin(0.75) and cos(0.75) are obtained from trigonometric table. The result is accurate to the four digits given.
 where the values for sin(0.75) and cos(0.75) are obtained from trigonometric table. The result is accurate to the four digits given.
where the values for sin(0.75) and cos(0.75) are obtained from trigonometric table. The result is accurate to the four digits given.
See also
References
- Holbrow, Charles H.; et al. (2010), Modern Introductory Physics (2nd ed.), Springer Science & Business Media, pp. 30–32, ISBN 978-0387790794.
- Plesha, Michael; et al. (2012), Engineering Mechanics: Statics and Dynamics (2nd ed.), McGraw-Hill Higher Education, p. 12, ISBN 978-0077570613.
- "Small-Angle Approximation | Brilliant Math & Science Wiki". brilliant.org. Retrieved 2020-07-22.
- Larson, Ron; et al. (2006), Calculus of a Single Variable: Early Transcendental Functions (4th ed.), Cengage Learning, p. 85, ISBN 0618606254.
- Boas, Mary L. (2006). Mathematical Methods in the Physical Sciences. Wiley. p. 26. ISBN 978-0-471-19826-0.
- Green, Robin M. (1985), Spherical Astronomy, Cambridge University Press, p. 19, ISBN 0521317797.
- "Slit Interference".